


Daniel Petrov, un tânăr ambițios și pasionat de neuroștiințe, a pornit într-o călătorie fascinantă prin lumea ingineriei medicale datorită subiectului pe care l-a ales pentru teza de licență. De la gândurile vagi din anul II de facultate despre realizarea unei proteze până la dezvoltarea unui exoschelet complex pentru lucrarea de licență, drumul său a fost plin de provocări, inovații și descoperiri personale. El este absolvent al Universității Tehnice din Cluj-Napoca, iar în prezent este student la master la Universitatea Politehnica din București.
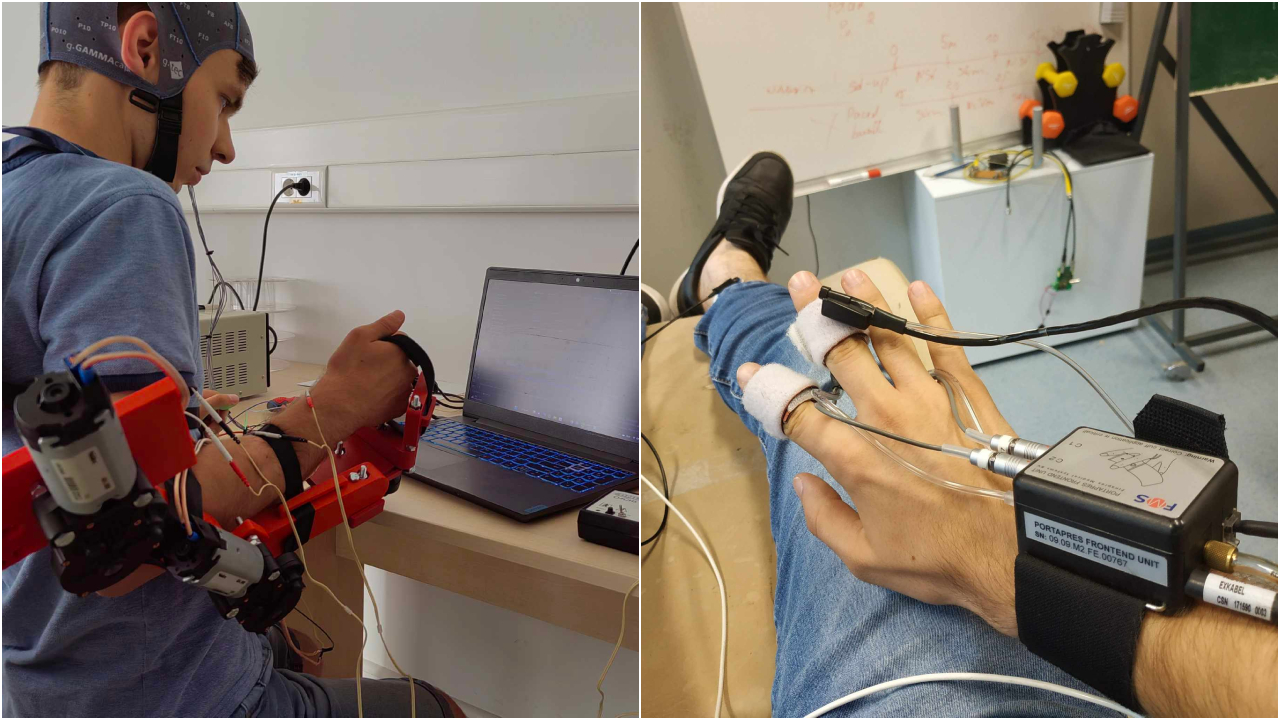
Lucrarea de licență a lui Daniel Petrov este intitulată. „Proiectarea unui sistem hibrid de recuperare pentru membrul superior uman”. Acest sistem are trei componente principale: un exoschelet pentru braț, antebraț și mână, un stimulator electric funcțional și o interfață BCI (Brain-Computer Interface) sub forma unei „căciuli” cu electrozi care captează undele cerebrale. În esență, Daniel a creat un sistem de reabilitare pentru persoanele care au suferit accidente și au probleme de mișcare din cauza leziunilor nervoase.
# De unde a pornit ideea creării unui exoschelet
Daniel a început să dezvolte această idee în anul II de facultate, având inițial în minte proiectarea unei proteze. Alegerea temei finale a fost influențată de o practică de vară la Viena, în cadrul unui program Erasmus+, unde a avut ocazia să lucreze la un subiect similar. Această experiență a fost esențială pentru înțelegerea practică a conceptului și a contribuit semnificativ la realizarea lucrării sale în anul IV. „Prin anul II, am început a mă gândi la ce mi-aș dori să fac la licență. Aveam o listă cu idei, printre care era și o proteză. Atunci încă nu aveam bine definite în cap etapele proiectării unei proteze, de aceea a rămas doar o idee și asta m-a împins mai târziu spre scopul de a face o proteză, pentru că mi se părea și ceva complicat, dar și ceva realizabil, iar mie îmi place deseori să mă avânt în probleme complicate. De aceea, în anul III, când mi-am căutat profesor de licență, am căutat un profesor care să cunoască procesul și să mă poată ghida în realizarea protezei. După ce am căzut de comun acord cu profesorul de licență că vom colabora, de la o discuție la alta am stabilit că lucrarea va presupune proiectarea unui exoschele, care funcțional și structural e diferit de o proteză, dar tot spre partea de proiectare 3D înclină”, explică tânărul.
Proiectul a luat naștere din dorința lui Daniel de a contribui la dezvoltarea protezelor și a dispozitivelor de reabilitare. Așadar, vizita la un centru de reabilitare din Klosterneuburg, unde a întâlnit un pacient tânăr cu afecțiuni locomotorii severe, a fost un moment definitoriu care l-a motivat pentru a-și finaliza lucrarea. „Accidentul l-a costat pierderea aproape totală a capacității de a mai putea merge. Tratamentul la care a fost supus la acea clinică a constat în folosirea stimulării electrice funcționale pentru reabilitarea căilor neuronale afectate, dar care încă puteau fi salvate, iar asta pe termen lung l-ar fi putut ajuta să își recupereze din mobilitate”, povestește Daniel.
# Cum funcționează exoscheletul creat de Daniel
Sistemul creat de Daniel Petrov este conceput să ajute pacienții care și-au pierdut parțial mobilitatea mâinii din cauza unui accident vascular cerebral sau a leziunilor la coloana vertebrală. A ales să se concentreze pe membrul superior, deoarece majoritatea activităților zilnice implică folosirea acestuia, iar pierderea funcționalității mâinii duce la o dependență mai mare de ajutor.
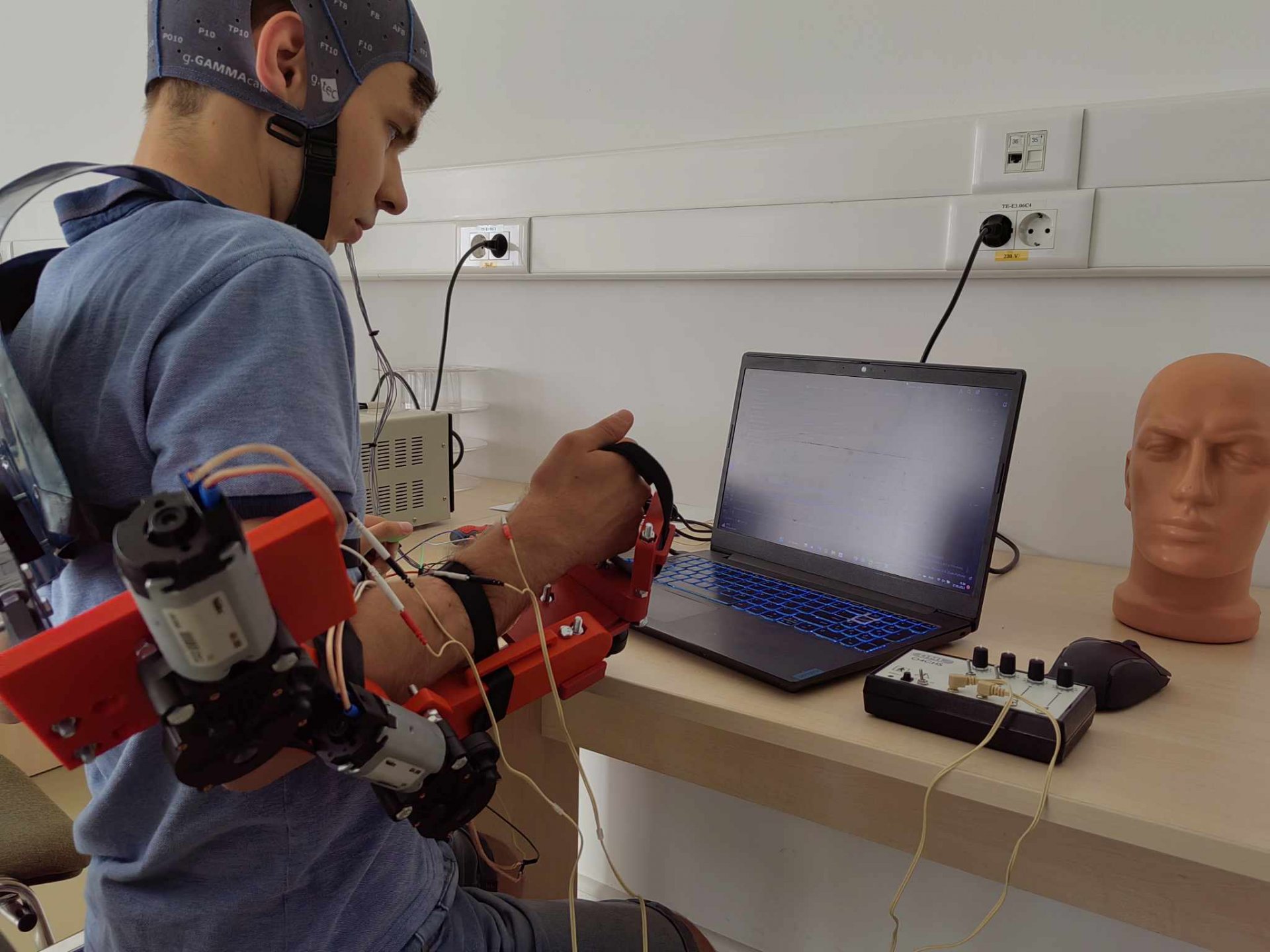
Exoscheletul este componenta de bază a sistemului. Acesta se fixează pe braț, având mai multe puncte de prindere și un punct de sprijin pe spate, care este prins de o armură în jurul pieptului. Exoscheletul include trei motoare care permit mișcările de flexie și extensie ale umărului, cotului și încheieturii mâinii. Stimulatorul electric funcționează pentru a ajuta mișcările făcute de exoschelet. Daniel a observat că stimularea electrică în tratament crește șansele de reabilitare, așa că această componentă este esențială în sistem. Sistemul funcționează astfel:
# interfața este pusă pe capul pacientului;
# pacientul își imaginează mișcarea mâinii la intervale variabile de timp;
# electrozii detectează semnalele;
# semnalele captate controlează motoarele exoscheletului;
# stimulatorul electric ajută mișcările făcute de exoschelet.
# Provocări și soluții tehnice
Proiectul a implicat numeroase provocări tehnice, cum ar fi măsurătorile antropometrice care presupun definirea caracteristicilor corporale, îmbinarea articulațiilor între ele și integrarea elementelor de susținere pentru motoare.
La dezvoltarea algoritmului pentru interfață, tânărul a folosit un soft open source. El a explicat cum a decurs tot procesul.
Pentru început, sunt adunate mai multe date despre semnalele venite de la creier. În timp ce electrozii sunt plasați pe cap, pe un ecran negru apare o săgeată la intervale de timp aleatorii, care arată spre stânga sau spre dreapta. Persoana trebuie să-și imagineze, timp de 10 secunde, mișcarea mâinii stângi sau drepte, în funcție de direcția săgeții. Această etapă este cea mai importantă și cea mai lungă, deoarece setul de date colectat influențează restul procesului. Dacă datele nu sunt potrivite, algoritmul nu va funcționa corect. Pentru a evita acest lucru, am colectat mai multe seturi de date prin mai multe ședințe în care am stat în fața calculatorului, cu interfața pe cap și mi-am imaginat mișcarea unei mâini, fără a mișca niciun alt membru, pentru a nu genera artefacte. După colectarea datelor, am folosit un algoritm de învățare bazat pe Analiza Discriminantului Liniar pentru a face predicții. Pentru a testa algoritmul, interfața este conectată din nou la o persoană, iar pe ecran apare aceeași săgeată. Diferența este că acum software-ul nu știe direcția săgeții, ci o prezice pe baza semnalului EEG citit de la creier. Algoritmul folosește aceste predicții pentru a controla exoscheletul.
Daniel Petrov
Motoarele folosite de Daniel în lucrarea sa de licență sunt trei servomotoare de curent continuu. Un avantaj al acestor motoare este că pot fi alimentate cu 12 volți, permițând astfel utilizarea unor baterii simple. Totuși, un dezavantaj este dimensiunea motoarelor – 20 × 10 × 10 centimetri – și o greutate de aproape două kilograme fiecare, ceea ce este destul de mult pentru un sistem de recuperare.
# Concluzii și perspective de viitor
Deși sistemul final dezvoltat de Daniel Petrov nu este încă utilizabil clinic, experiența dobândită în domeniul ingineriei de reabilitare i-a fost foarte utilă. Dânsul speră că proiectul său ar putea inspira alți studenți și cercetători să continue dezvoltarea unor tehnologii similare, contribuind astfel la îmbunătățirea vieții pacienților cu afecțiuni neuronale. „Inovația e una dintre condițiile obligatorii când se alege tema de licență, prin urmare am avut de analizat ce studii au fost efectuate și ce modele de echipamente de recuperare au fost dezvoltate. Majoritatea dintre ele folosesc fie un exoschelet simplu, fără motoare, combinat ca stimularea electrică, tot ansamblul fiind proiectat fie doar pentru mână sau pentru braț, fie combină exoscheletul cu o interfață BCI (Brain Computer Interface). Lucrarea mea se diferențiază datorită faptului că nu am combinat doar două dintre cele trei elemente, ci le-am combinat pe toate trei (interfața, stimularea și exoscheletul). În plus, sistemul a fost gândit pentru recuperarea tuturor celor trei încheieturi ale membrului superior, nu doar a uneia. Așadar, sper că peste ceva timp să revin la lucrarea mea din anul IV cu scopul de a o îmbunătăți, pentru a putea fi un echipament disponibil pentru pacienții cu afecțiuni neuronale”, afirmă Daniel.